![]()
![]()
![]()
![]()
![]()
ダイレクトドライブモータ制御
オープンソース2輪ロボット
Diablo
ダイレクトドライブ式セルフバランス2輪走行ロボット
![]()

DIABLOは、静音ダイレクトドライブモーターを使用した脚式2輪走行ロボットプラット
フォームで、片足当たり3軸の関節で絶妙にバランスをとりながら様々な姿勢で走行します。
オープンな開発プラットフォームにより、研究・教育から実用アプリケーションまで、
幅広く活用することができます。
特長
 |
 |
 |
 |
 |
||||
| 柔軟性 | 悪路適応 | ジャンプ | 安定性 | モーション構築 | ||||
| セルフバランスで 最大37°の傾斜を 制御可能 |
脚部のダイレクト ドライブ・インピー ダンス制御により 衝撃力を60%吸収 |
最大17N.mの関節 トルクで強力な バースト出力を提供 |
16ビット高精度関節 エンコーダーで0.01度 以内の精度 |
マルチ制御インター フェースで二次開発 をサポート |

プログラマブルでオープンな開発プラットフォーム
| ・カスタム制御及びDIY開発 |
| DIABLOはオープン開発プラットフォームですので、ユーザーが探索して、カスタム制御を行う事が出来ます。 オープン開発プラットフォームを最大限使用する事により、ユーザーはロボットの能力を最大限引き出し、 各種用途向けに開発が出来ます。 ロボットアームの組込、サーチライト、画像センサ、ラック等を搭載出来ますので、新しいイノベーションへの キャンバスになります。 また、LiDARや深度カメラを搭載することで、ROS2のAPIを使用したプログラムにより、マッピング機能を 利用した自律走行や自動運搬機能も搭載出来ます。 |
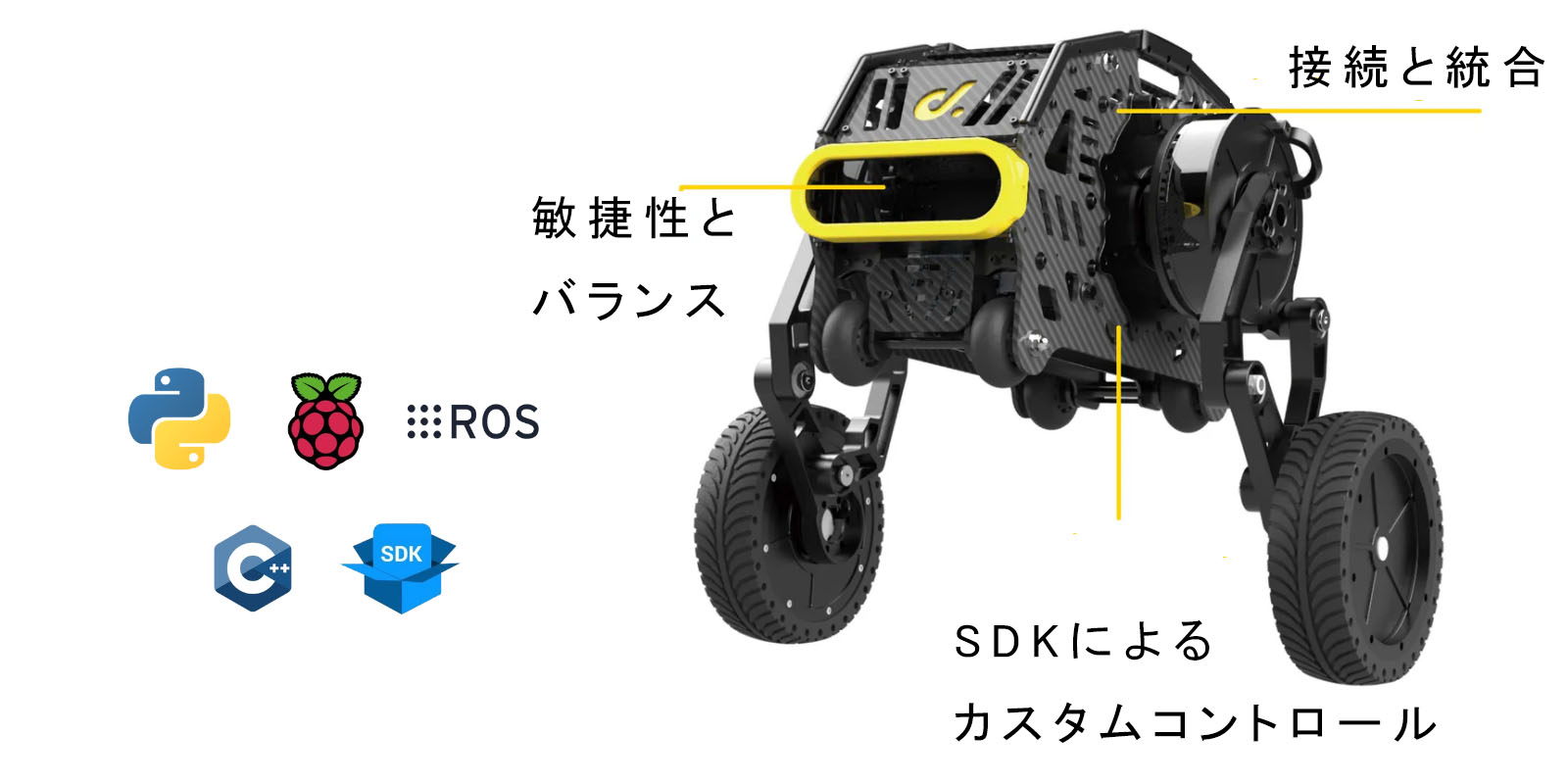
| ・強力なSDKによるカスタム制御 |
| DIABLOは強力なSDKにより、プリプログラムされている機能以上の能力を発揮します。 SDKを使用すると、基本にあるアーキテクチャにアクセスして、カスタム制御が可能です。 ROS、Python、Raspberry Pi又はC++のコードを使ってより進んだ制御及び動きをさせる事が出来ます。 DIABLOは、開発者や研究者のパートナーとして役立つロボットです。 |
仕様
 |
 |
 |
| Standing Mode | Squatting Mode | Creeping Mode |
| 重量 | 22.9 kg |
| 寸法 | 540 x 371 x 491 mm (Standing Mode) |
| 540 x 371 x 270 mm (Creeping Mode) | |
| 最大荷重 | Standing Mode : 4 kg |
| Creeping Mode : 80 kg | |
| 動作時騒音 | < 49 dB |
| 最高速度 | 2 m/s |
| 連続姿勢保持時間 (環境温度25℃の場合) | Standing Mode : 約 3 時間 |
| Squatting Mode : 約 15 分 | |
| 最大連続走行時間 (環境温度34℃の場合) | Standing Mode : 約 3 時間 |
| Creeping Mode : 約 4 時間 | |
| 跳躍高さ | 約 8 ㎝ (無積載状態) |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.